Arduino Quadcopter
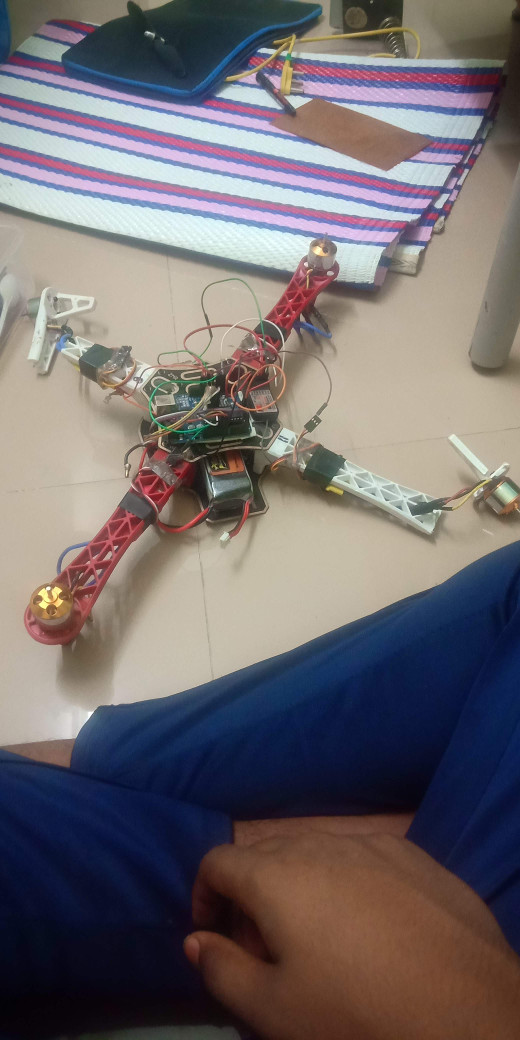
Arduino Quadcopter from scratch
Every engineer wishes to build a drone at least once in his life. I also dreamed about the same and took a step to make it totally from scratch without any readymade flight controllers. The motivation to build from scratch was to learn PID. I wanted to learn PID and apply it in the real-life.
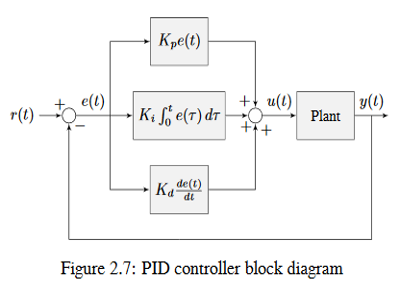
pid
The basic goal of PID is to reach the desired state under given uncertainties. In case of Quadcopter there are uncertainties like wind, center of mass position, etc. You have tune PID parameters to obtain optimum results. From the following images, you can get an Intuitive idea of PID
2D model approximation for PID testing
The 2D model approximation shown in the above image is best to do that. with the help of this model, I could learn more about PID and its parameter's response. The one more major learning was to learn how to apply filters like complementary filters, Kalman filters to reduce the noise in the gyroscope due to vibrations of the frame. you can watch the full video of the model that I made...


As there was no one to guide me on how to make it properly, I failed too many times. Things went wrong when I started testing. I harmed my self two times, broke the frame, the battery swelled and I had to replace it 3 times


After months of efforts I could reach my goal!!!!!